Welcome,I'm Akshay
Crafting high-fidelity digital experiences that blend aesthetic design with compelling video narrative.
Welcome,I'm Akshay

Crafting high-fidelity digital experiences that blend aesthetic design with compelling video narrative.
Creative Deck
An interactive showcase of my workspace, storytelling medium, and post-production suite.
Crafting Visual Stories through Motion & Design.
I am a professional Video Editor, Graphic Designer, and Creative Director. With years of experience working with top-tier creators, brands, and digital studios, I specialize in high-end video production, visual effects, and modern brand designs that demand attention.
My goal is to translate complex ideas into striking visual masterpieces. Whether it's cinematic storytelling, custom motion graphics, or complete visual identities, I blend core design principles with fluid motion to deliver premium, high-impact results.
Premiere Pro
After Effects
Photoshop
DaVinci Resolve
Illustrator
InDesign
Featured Work
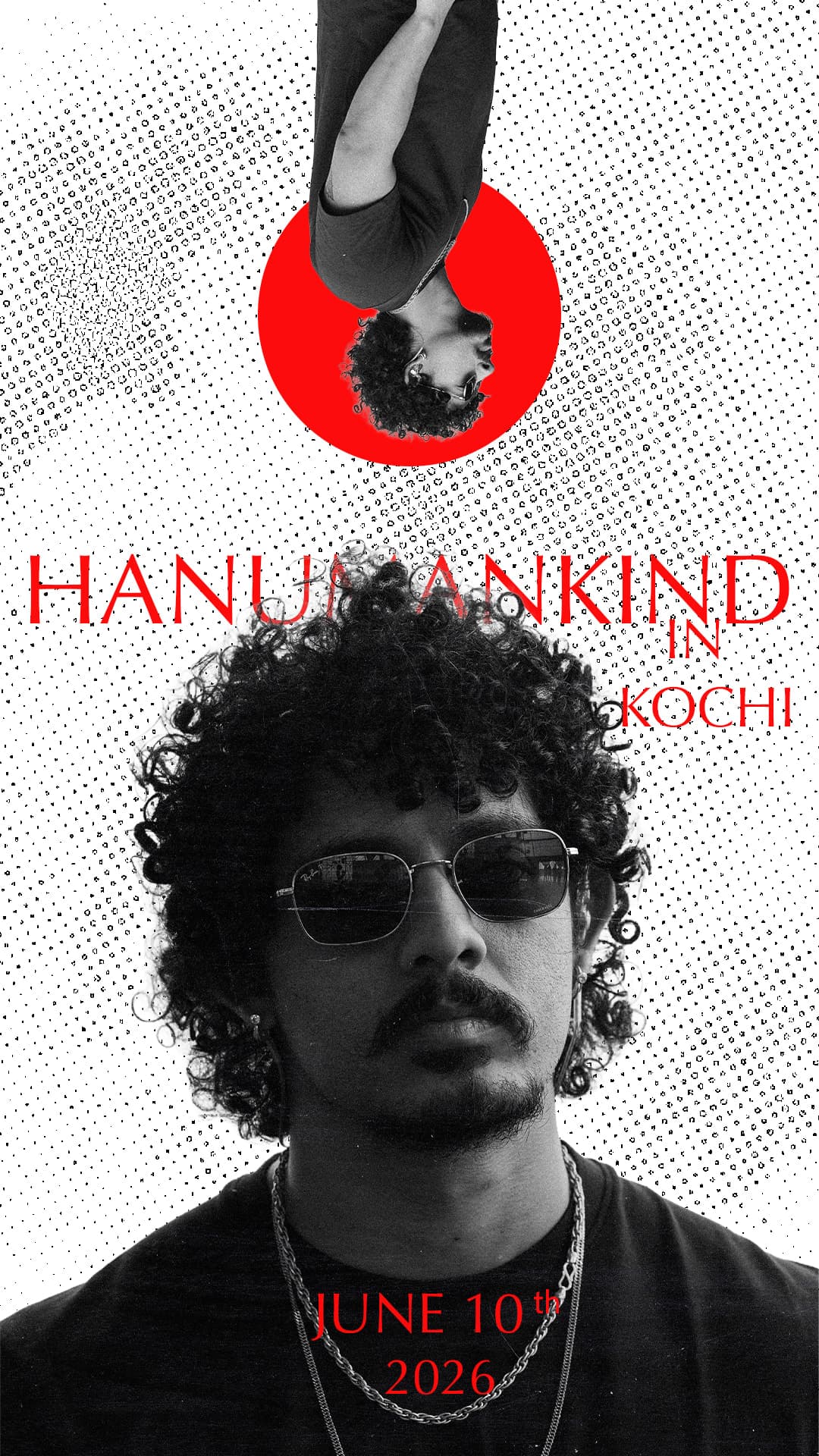
Hanumankind Kochi Show
One Stage. One City. One Moment. This is a professionally designed event poster for Hanumankind's Kochi show, built with a striking duotone halftone aesthetic (very popular in hip-hop/streetwear visual culture).
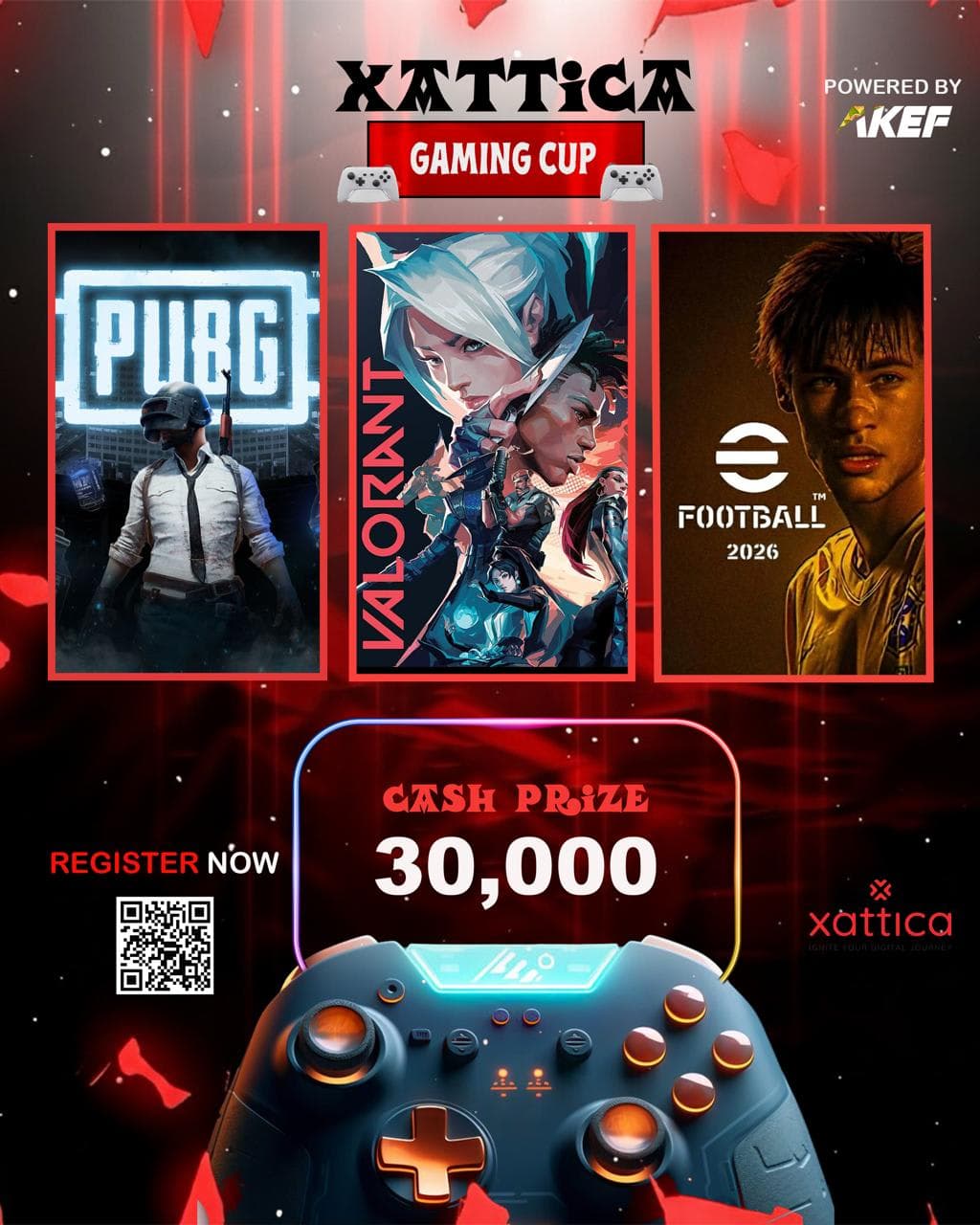
🎮 One Arena. Three Games. One Champion
An aggressive esports poster with red cinematic lighting, game covers and a glowing 3D controller centerpiece. Built using Adobe Photoshop for atmosphere and Adobe Illustrator for grunge typography.

✨ Tradition Meets Celebration
A festive boutique flyer with a royal purple bokeh background, gold mandala decorations and an ethnic subject cutout. Built using Adobe Photoshop for effects and Adobe Illustrator for ornaments and typography.

🎓 Design Doesn't Teach Itself.
A sleek dark EdTech poster with a 3D character breaking out of a device frame. Built using Adobe Photoshop for glow effects and compositing and Adobe Illustrator for logo and layout.

🎨 Bold Agency. Sharper Identity.
A bold digital agency promo post with diagonal marquee banners and a subject cutout over a grid background. Built using Adobe Photoshop for compositing and Adobe Illustrator for tags and typography.

⚡ Stop Waiting. Start Doing.
A striking motivational poster with a jumping subject layered between oversized bold text on a teal background. Built using Adobe Photoshop for layer masking and Adobe Illustrator for typography.

🖤 Less Pressure. More Flow.
A clean brutalist typography poster with neon lime-green highlights and oversized stacked letterforms. Built entirely using Adobe Illustrator for vector typography and geometric layout.

📱 Don't Just Learn. Dominate.
A dark course ad with floating 3D platform coins and a bold Malayalam headline. Built using Adobe Photoshop for compositing and Adobe Illustrator for typography and branding.
Initiate Contact
Let's build something visual.
Whether you are planning a high-end luxury brand overhaul, a kinetic typographic poster series, or a cinematic color grading project — drop me a line and let's collaborate.